Модель аппарата на воздушной подушке

- Подробности
- Категория: Естественно-научная секция
- Опубликовано: 21.08.2019 19:32
- Автор: Super User
- Просмотров: 684
Введение
В современном мире остро встает вопрос о проходимости транспортных средств. Большие пространства нашей родины и также ее сложный рельеф заставляют конструкторов задумываться о транспорте, способном преодолевать препятствия, которые чинит нам природа и погода.
Перспективным видом такого транспорта являются аппреты на воздушной подушке.[8] Они имеют возможность двигаться и по суше, и по воде, не меняя скорости. Практически три четверти берегов морей и рек не только в России, но и по всей планете, позволяют таким аппаратам выходить на сушу без остановки. Именно поэтому в этом году я решил сделать модель аппарата на воздушной подушке чтобы на примере этой модели оценить достоинства и недостатки этого вида транспорта.
Целью исследования является создание модели аппарата на воздушной подушке для оценки его положительных и отрицательных качеств.
В ходе работы над проектом необходимо решить следующие задачи:
- Изучить историю создания как «больших» АВП, так и их моделей.
- Проанализировать и выбрать схему подъема аппарата.
- Проанализировать и выбрать вариант управления аппаратом.
- Сделать модель для демонстрации эффекта воздушной подушки
- Сконструировать действующую модель аппарата
- Оценить по модели достоинства и недостатки АВП
Моделирование аппаратов на воздушной подушке
Сейчас большое количество различных моделей и аппаратов на воздушной подушке создается моделистами. Эти модели могут быть копиями настоящих аппаратов, а могут представлять собой оригинальные конструкции. Кто-то делает модели транспорта будущего. В зависимости от цели моделирования модели на воздушной подушке классифицируют следующим образом: масштабным самоходные, спортивные, экспериментальные.
Модели АВП можно также классифицировать в зависимости от того, к какому транспорту они относятся: самолеты на воздушной подушке; наземные АВП; железнодорожные АВП. В любительском моделировании нашли отражение все те технологии, которые используются в «большой» промышленности.[1] Чаще всего в моделях АВП используют камерную схему и сопловую схему с «юбкой». Моделисты создают миниатюрные копии хорошо известных АВП либо проектируют новые морские, сухопутные и железнодорожные АВП.
Для моделей АВП используются двигатели всех типов, которые применяются в авиа, авто и судомоделизме. [7]
Управление моделями осуществляется дистанционно: как по радио, так и с помощью тросов (кордовые модели).[6]
Конструкция, технология изготовления и внешний вид модели зависит от ее назначения. Действующие модели-копии считаются наиболее совершенными и по конструкции, и по дизайну. Спортивные модели интересны тем, что способны развивать большую скорость, а также очень хорошо управляться. С помощью экспериментальных моделей можно изучать особенности и свойства этих устройств в движении. Вот именно такую модель я и решил сделать для своих исследований.
При конструировании моделей следует учитывать необходимость обеспечения устойчивости модели и ее прочности. Для того чтобы модель АВП могла развить наибольшую скорость, естественно, требуется установить двигатель максимальной мощности, но при этом он должен как можно меньше весить. В подборе двигателя мне помогли ребята, занимающиеся в молодежном конструкторском бюро кафедры «Авиационно-ракетных систем» МАИ, поскольку рассчитать двигатель самостоятельно я пока не могу.
Модели, предназначенные для использования над поверхностью воды, должны обладать соответствующей плавучестью, которая гарантирует поддержание модели на водной поверхности после остановки двигателя, создающего воздушную подушку. Для того чтобы модель АВП могла плавать с выключенным двигателем лучше всего использовать пенопласт. Он легок и не размокает в воде. Я решил учесть и это при создании своей модели.
Выбор системы подъема
Особенности моделей АВП таковы, что некоторые известные схемы подъема для них неприемлемы. Наиболее распространенными типами воздушной подушки являются камерная и сопловая схемы.
Камерная схема наиболее простая из всех известных применяется чаще всего в варианте жесткого корпуса.[см. рисунок 1 в Приложениях] Для подачи воздуха используются вентиляторы, изготовленные из дерева или металла, а иногда воздушные винты авиамоделей. Для создания тяги используются как модельные двигатели внутреннего сгорания, так и модельные электромоторы, применяемые для других схем воздушной подушки. В целях безопасности я решил использовать электрические моторы.
Сопловая схема имеет очень много вариантов. Простые модели характерны несложными конструктивными решениями кругового сопла. [1]
Так как двигатели подъема моделей АВП создают небольшое воздушное давление, материал, из которого изготовляется гибкое ограждение, должен быть гибким, легким, устойчивым к истиранию и влиянию атмосферы. Для моделей, работающих внутри помещений, используется ткань разных видов на хлопчатобумажной и другой основе. При использовании гибкого ограждения самой сложной проблемой является соединение его с корпусом модели. Сложность возникает из-за того, что это соединение должно быть простым в эксплуатации, легким в изготовлении, не пропускать воздух и не портить внешний вид. [см. рисунок 3 в Приложениях]
Движение и управление моделью
Движение модели АВП осуществляется с помощью горизонтальной тяги, создаваемой движителем. Конкретная конструкция двигателя зависит от фантазии моделистов и от того, какую модель мы проектируем. Чаще всего используют воздушный винт, закрепленный напрямую на авиамодельном двигателе, в этом случае устройство для создания тяги получается простым и легким. Такое устройство модели позволяет управлять направлением движения модели при помощи руля, который находится в потоке воздуха за воздушным винтом, из-за этого улучшается управляемость аппарата. Кроме того, подобная система позволяет использовать опыт авиамоделизма, который я приобрел на занятиях авиамоделизмом.
Интерес вызывает, и система тяги модели АВП при помощи воздушных сопел в кормовой части модели, через которое вырывается воздух, идущий от нагнетателя или из воздушной подушки. Размещение сопел по бокам аппарата позволяет использовать их для изменения направления тяги, т. е. для торможения и разворота модели.
Управление моделями на воздушной подушке осуществляется с целью контроля за направлением движения в горизонтальной плоскости.[см. рисунок 2 в Приложениях] Чтобы свободно движущаяся модель имела надежную управляемость, рулевое устройство должно быть жестко закреплено на корпусе это исключит произвольные отклонения на любом участке траектории движения.
Следует учитывать влияние на модель ветра. Нельзя допускать, чтобы под влиянием ветра у модели появлялась склонность к отклонению в центр площадки, вокруг которой она летает,— может произойти авария или полная поломка модели. Этого
Дистанционное управление моделями АВП осуществляется путем воздействия на руль направления. Успешное использование аппаратуры дистанционного управления в большой степени зависит от исполнительных механизмов, которые так же важны, как и приемно-передающая аппаратура. Из огромного числа их разновидностей и типов в моделировании АВП следует применять лишь наиболее отработанные механизмы. Среди широко распространенных исполнительных механизмов, применяемых в одноканальной аппаратуре, можно выделить самое простое устройство – рулевую машинку.
Конструирование аппарата
Для того чтобы убедиться в возможности создания воздушной подушки в домашних условиях я сделал простую бумажную модель аппарата.[см. рисунок 4 в Приложениях] Эксперимент показал, что мое предположение верно, потому что модель слегка парила над землей.
Поэтому я решил продолжать разработку дальше. Я взял пенопластовый лоток и вентилятор, который используется для охлаждения системного блока компьютера. Прикрепил вентилятор к лотку. Для того чтобы создать воздушную подушку я использовал различные источники питания вентилятора.[см. рисунок 5 в Приложениях] Как оказалось, достаточную воздушную подушку этот аппарат создавал только с 3 батарейками типа «Крона» или с блоком питания на 30 В. Я решил, что мне нужно взять какой-то другой вентилятор для создания воздушной подушки. При занятиях автомоделизмом я заметил, что вентилятор, который иногда ставят для охлаждения автомобильных электродвигателей, дает очень мощный поток воздуха, поэтому я решил использовать один из таких двигателей из запасного набора к автомодели.
В качестве основы конструкции я решил использовать все тот же пенопластовый лоток, так как к нему проще всего было крепить какие-то элементы. Я прикрепил к нему аппаратуру управления на термоклей или двухсторонний скотч, а внешний корпус приклеил специальным клеем. В результате получилась конструкция, которую можно увидеть на рисунке 6 в Приложениях.
Однако мощности двигателя все равно не хватало. В книге по моделирования аппаратов на воздушной подушке я прочитал, что мощность двигатели при использовании «юбки» уменьшается на треть. [1] Поэтому я решил сделать для моего аппарата гибкое ограждение из пакета. После этого мой аппарат начал подниматься над землей, а после того, как я поставил более мощный аккумулятор, он уверенно движется.
На рисунке 6 мой аппарат изображен без внешнего корпуса, чтобы было видно его устройство. Основным элементом аппарата является двигатель с винтов в центре, это и есть система подъема. Он через специальный регулятор мощности подключен к аккумулятору, а управляет всем система управления.
Так как я сделал небольшой аппарат, то поставить отдельный двигатель для движения и управления у меня не получилось, поэтому я сделал поворачиваемое сопло, которое одновременно заставляет аппарат двигаться вперед и управляет поворотом.
Экономический расчет
На уроках технологии нас учили делать экономический расчет по стоимости выполненного изделия, я решил проделать такой расчет и для моего аппарата.
Сначала посчитаем стоимость материалов:
- Лоток – это отход, который получается при покупке продуктов питания, например, виноград или конфеты, поэтому его стоимость будет составлять 1 рубль.
- Двигатель с винтом – отработанные элементы, оставшиеся после замены их на более новые в автомодели, стоимость таких элементов на распродаже стоит 300 рублей.
- Аппаратура управления – 500 рублей, потому что тоже взята из старой модели.
- Аккумулятор используется время от времени из работающих автомоделей, поэтому его стоимость можно не учитывать.
- Для оформления использовался один лист пенопласта – 40 рублей за квадратный метр, поэтому стоимость листа – 10 рублей.
- Для соединения деталей потрачено клея и скотча на 30 рублей.
Получаем стоимость материалов для модели – 881 рубль. Это небольшая цена для экспериментальной модели, потому что такая модель позволит в будущем сэкономить больше денег при создании большой модели.
Заключение
Итогом моей работы стала действующая модель аппарата на воздушной подушке. Эту модель я использую для проверки разных идей, потому что хочу летом построить большую модель АВП.
В ходе исследований этой модели я заметил главный недостаток таких аппаратов. Для поддержания в воздухе аппараты на воздушной подушке тратят очень много энергии. Однако это легко перекрывается их достоинствами в случае необходимости передвижения по местности с различным рельефом и даже по реке. Например, такой аппарат можно использовать для буксировки веревки к человеку, попавшему на тонкий лед. Ни один другой аппарат на такое не способен.
Дальше я продолжу работу с экспериментальными аппаратами в нашем клубе технического творчества, потому что считаю это очень интересным занятием.
Библиографический список
Книги
- Бень, Е. Модели и любительские суда на воздушной подушке [Текст] / Ежи Бень; пер. с польск. – Л.: Судостроение, 1983. – 128 с.
- Бескурников, А. А. Юный моряк-конструктор [Текст] / А. А. Бескурников. – М.: Редиздат ЦС ОСОАВИАХИМА СССР, 1941. – 162 с.
- Заворотов, В. А. От идеи до модели [Текст] / В. А. Заворотов. – М.: Изд-во «Сделай сам», 1987. – 144 с.
- Книга юного конструктора: в 2 ч. [Текст] /Авторы описаний и конструкций: А. Абрамов, Д. Бунимович и др. – М.: Издательство детской литературы ЦК ВЛКСМ, 1937 – Часть 1. – 1937. – 294 с.
- Костенко, В. И. и др. Мир моделей. [Текст] / В. И. Костенко и др. – М.: ДОСААФ, 1989. – 200с.
- Миль, Г. Модели с дистанционным управлением [Текст] / Генрих Миль; пер. с нем. – Л.: Судостроение, 1984. – 288
- Отряшенков, Ю. М. Радиоуправление моделями самолетов, кораблей и автомобилей [Текст] / Ю. М. Отряшенков. – М.: ДОСААФ, 1958. – 144 с.
- Сахновский, Б. М. Модели судов новых типов [Текст] / Б. М. Сахновский – Л.: Судостроение, 1987. – 144 с.
Печатная периодика
- Модели автолетов на воздушной подушке: Приложение к журналу «Юный техник» / учредитель Центральная станция юных техников г. Москва. – 1964. – М.: Изд-во «Малыш» Государственного комитета Совета Министров РСФСР по печати, 1964– . –Непериод.
Приложения
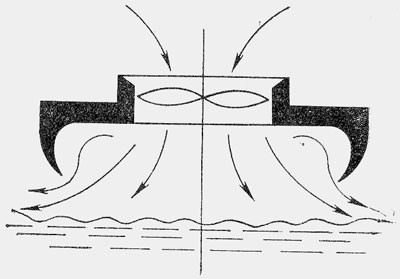
Рисунок 1. Камерная схема создания воздушной подушки
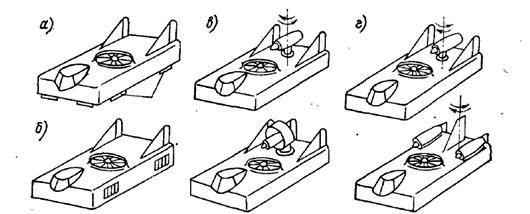
Рисунок 2. Виды схем управления аппаратом: а) с заслонками; б) со струйными рулями; в) путем поворота двигателя.
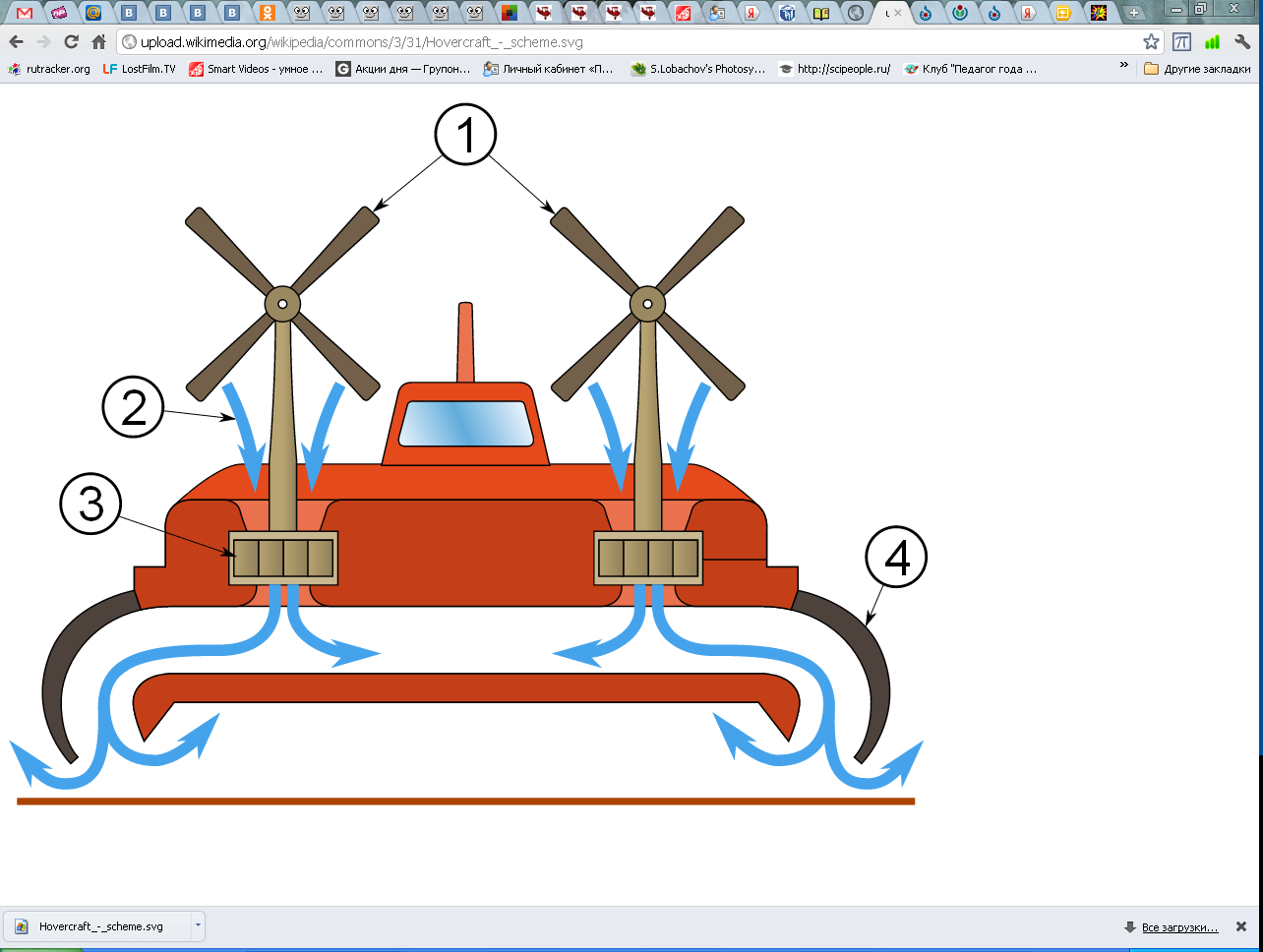
Рисунок 3. Сопловая схема создания воздушной подушки: 1) винты движения, 2) забор воздуха, 3) двигатели подъема, 4) мягкий борт – «юбка»

Рисунок 4. Бумажная модель АВП
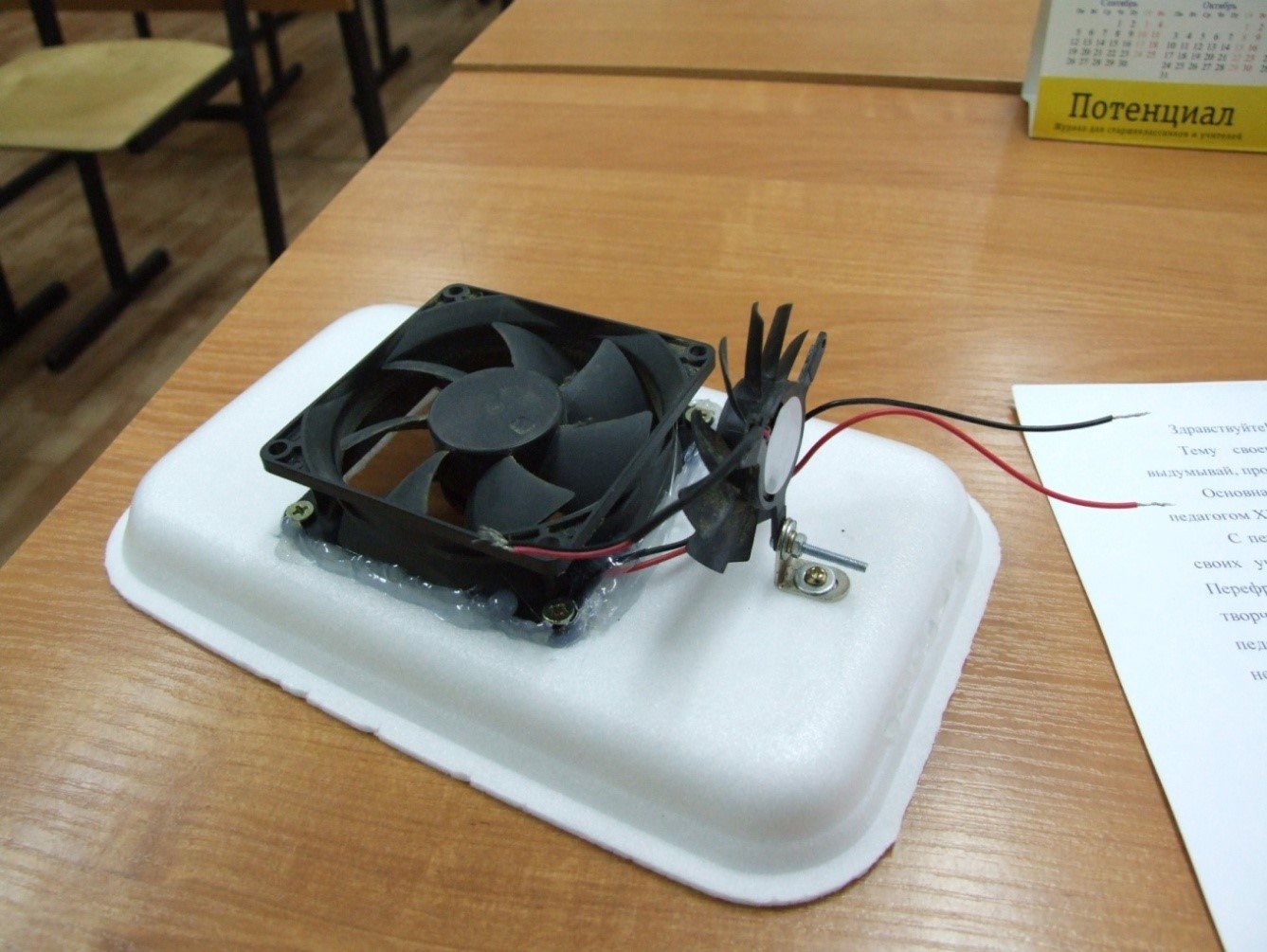
Рисунок 5. Первые эксперименты
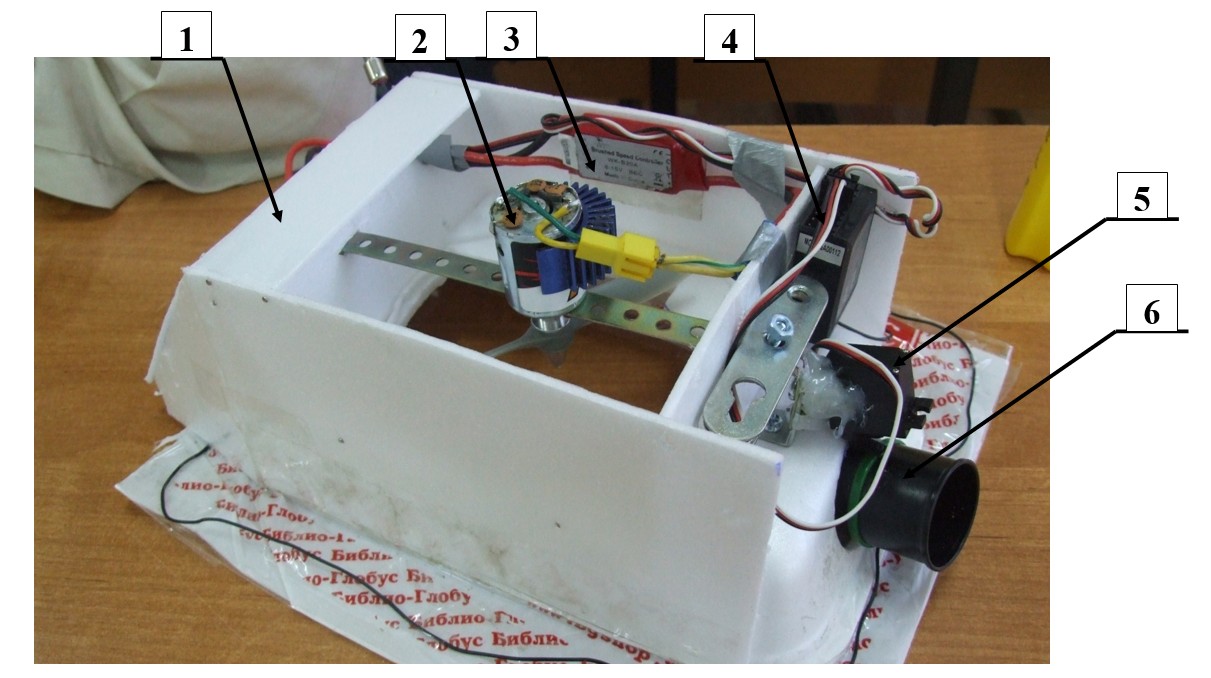
Рисунок 6. Схема аппарата на воздушной подушке: 1) отсеет для аккумулятора, 2) двигатель с воздушным винтом, 3) регулятор скорости, 4) приемник команд управления, 5) рулевая машинка, 6) поворотное сопло